Industrial Robot Pick and Place
October 2019 – December 2019, WPI
This is a team project with Michael Abadjiev, Orion Strickland and Maricella Ramirez.
In this project, an ABB IRB1600 industrial robot is used in a pick and place setup to paint a LEGO mosaic picture. With specially designed end-effector and programmatically generated motion sequence in RAPID.
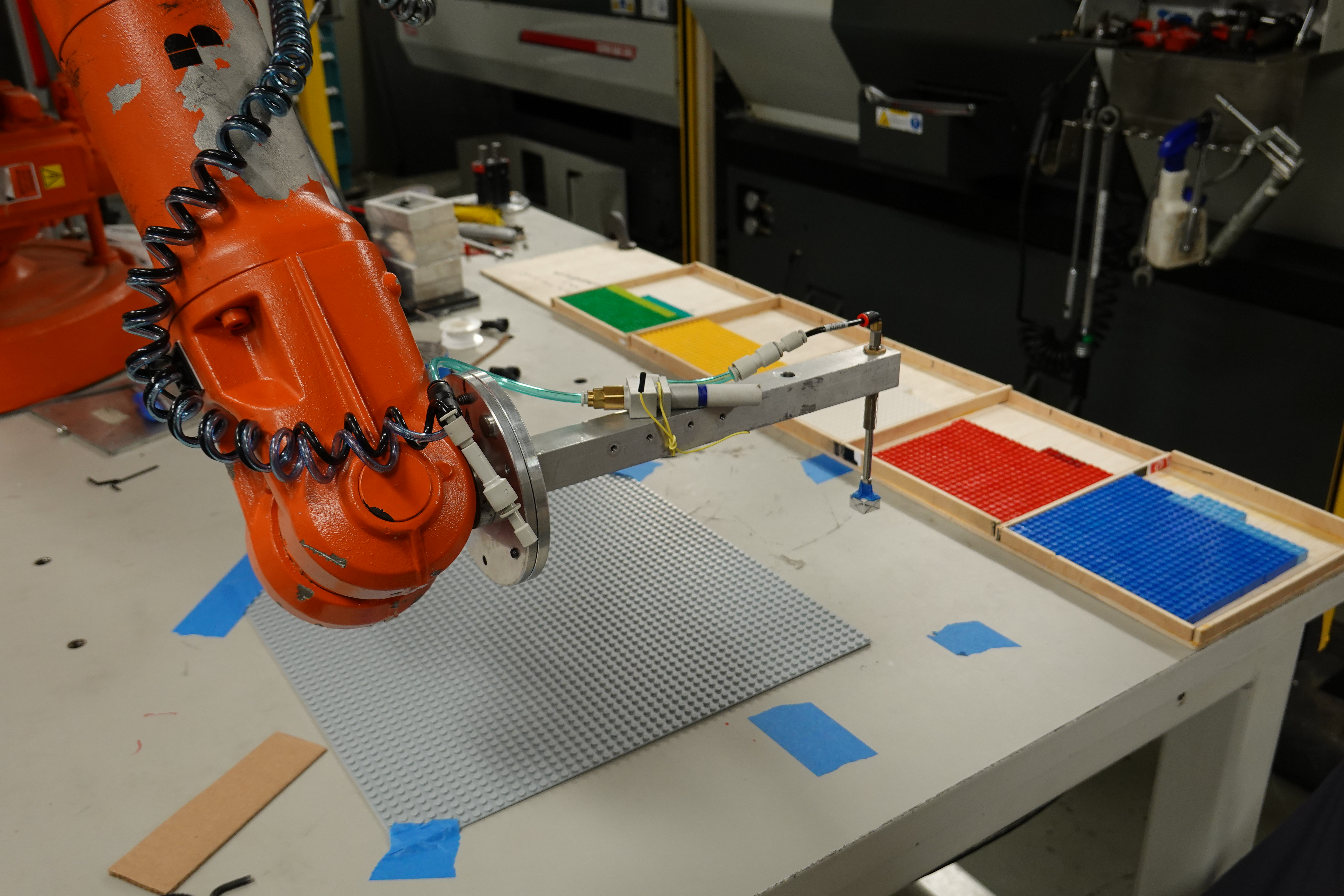
Overall setup with painting workspace, with Robot, Special End Effector, and material tray
-
Designed a simple material tray for feeding LEGO bricks.
- Fallback to manually advancing bricks in the tray due to time constrains.
-
MATLAB script is created to convert any images into a LEGO mosaic pixels
- Input image is down-sampled to a smaller size
- Image color is converted to subset of available LEGO colors using HSV color space.
-
Robot program is generated using RobotStudio in ABB’s RAPID language.
- Attempted to used TCP/IP between MATLAB program and RAPID program to transmit pick/place location, abandoned due to high latency.
- Programmatically generated RAPID code with location of each pixel from the MATLAB script directly.
-
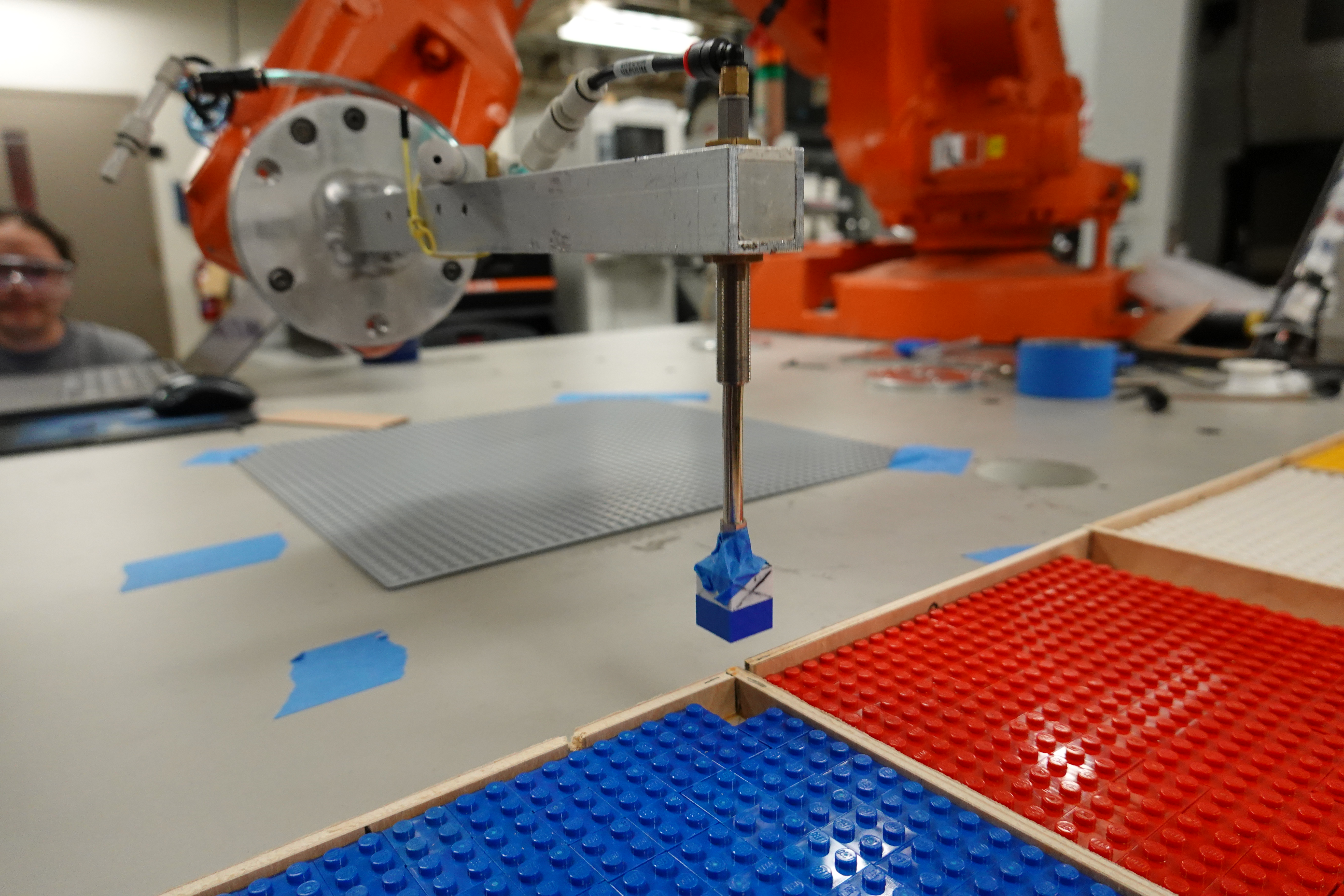
Special vacuum end-effector, made from another LEGO brick and common vacuum attachment for a prefect fit onto target LEGO pixels.
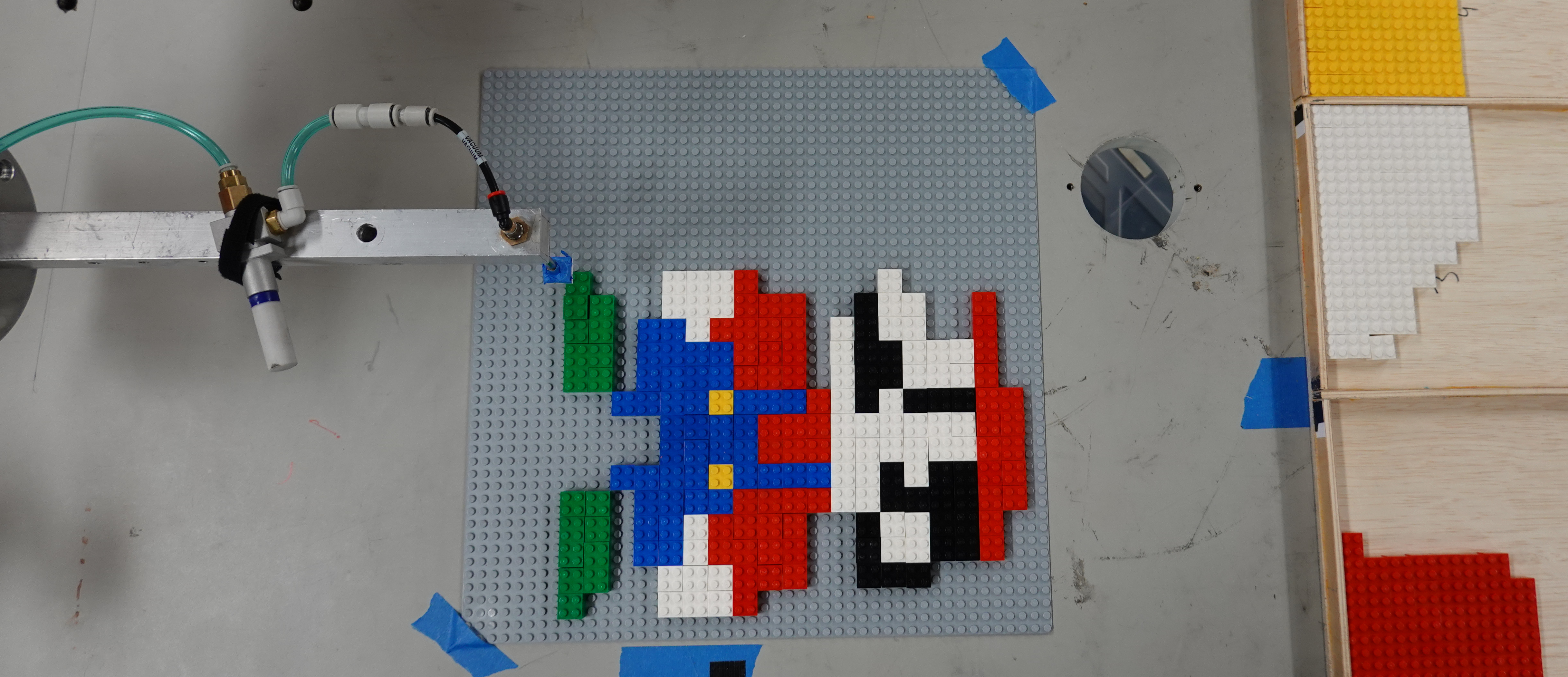
The finished paint